ナイフ型デバイスを用いた力覚提示装置の開発
本研究室で初めて開発した力覚提示装置です.パラレルリンク機構を用いたデバイスは操作者に重さを感じさせることなく,切離感覚のみを提示します.
当初は,
3次元マウスでネズミの脳に穴をあけて内部を見るシステムでした.しかしながら,思った位置をポイント出来ないという問題点があり,これを解決するために操作感を得ることが必要となりました.これを受けてナイフ型デバイスが開発され,仮想の物体を触る,あるいは切る時の感覚を得るシステムに発展しました.
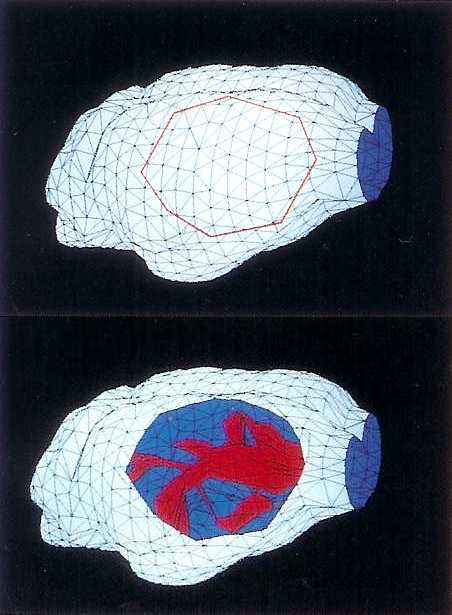
仮想ネズミ脳に穴を開けて脳室の部分をのぞき見ている様子
| クリックすると画像が見られます↓↓↓↓↓↓↓↓↓↓↓↓↓ |
説 明 |
 |
ナイフ型デバイスで球体に穴をあけています.液晶シャッター眼鏡で両眼視差により,立体視を行います 空間内に存在する仮想球体に触れると,ナイフ型デバイスから抵抗力を与え,切離感覚を得ることができます. |
 |
これは,三次元立体視マウスを用いてネズミの脳を切離している様子です. 平面上を動くだけでなく,マウスが前後に動いてネズミ脳の任意の場所に穴をあけます. |
 |
穴をあけるとネズミの脳に穴をあけた画像を合成します. このシステムでは,ネズミの脳室を赤く,それ以外の部分を青く見せています. 実際のネズミの脳はもちろん空洞ではありませんので,脳室の部分だけが見えることはありませんが,わかりやすく表示しております. |
 |
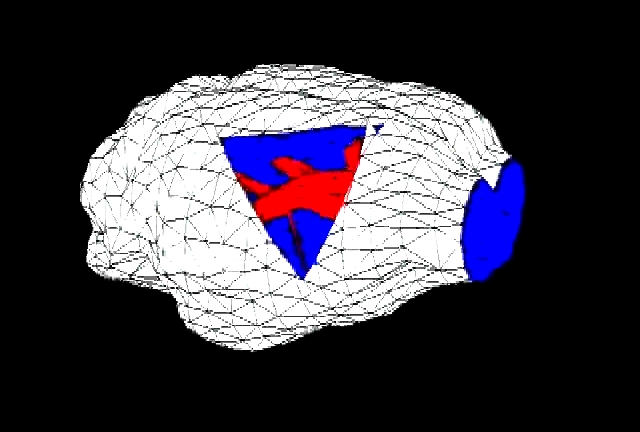
上記のネズミの脳室の部分だけを取り出して表示します. 実際の脳からこの部分だけを取り出すことはほぼ不可能ですが,人工現実感の技術により,立体視を行い,形状について見識を深めることができます. |
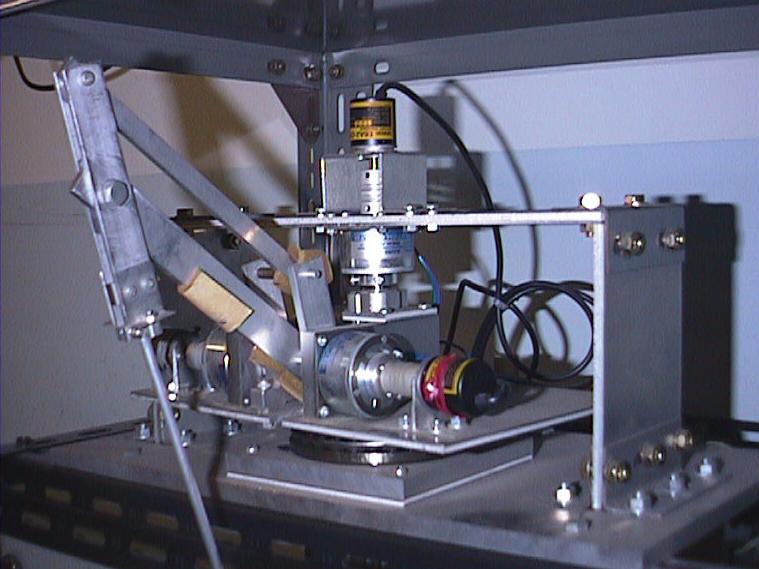
パラレルリンク機構のナイフ型操作デバイス